芝刈り、掃除、窓ふき。ロボットが、日常の家事の一部を代行することができます。これによって、驚くほどの時間と労力を節約できます。ドイツ情報通信協会(Bitkom)の調査によれば、1,000人を超える調査参加者の42%が、ロボットを自宅に所有してもよいと考えています。80%を超える人たちが、ロボットに掃除または床洗浄の手伝いをしてほしい、41%が庭仕事の手伝いをしてほしいと答えています。回答者の15%が、すでに自宅にロボットを所有しています。
自由に制御できる機械は、古くから人類を魅了してきました。しかし、ロボット工学やロボットの起源は、どのようなものでしょうか。過去にはどのような出来事があり、また、将来はどうなるのでしょうか。最も重要な部品は何でしょうか。ロボットはどのようにして動作するのでしょうか。コボット、ナノボットとは何でしょうか。ロボットはどの程度の知能を持っているのでしょうか。感情を抱いたり、社会的な行動を学んだりすることは可能でしょうか。人類の将来に根本的な変革をもたらす技術について、その最も重要な側面をご説明いたします。
ロボットの定義

ロボット工学は、機械工学、電気工学、コンピュータサイエンスなどを含む科学技術の一分野です。ロボット工学では、ロボットおよびコンピュータシステムの制御、センサーフィードバック、情報処理について、その設計、製造、運用および利用を扱います。ロボットは、センサー、アクチュエータ、情報処理によって、現実の物理的世界との相互作用を実現する装置です。ロボットのキーアプリケーションは、産業(インダストリー)です。正確に言えばインダストリー4.0であり、そこでは産業用ロボットが使われています。
ロボットの応用分野およびメリット
協働ロボット(コボット)

協働ロボットすなわちコボットは、ますます重要性が高まっています。多くの産業分野で、協働ロボットが、従来の産業用ロボットの代わりに、あるいは補助として使われるようになってきました。コボットは、一般的な産業用ロボットのように保護装置によって作業者と隔離されることなく、生産現場で人と一緒に作業しています。従来の産業用ロボットと比べると、協働ロボットは小型であり、より柔軟な使い方ができ、より容易にプログラムを作ることができます。
コボットは、人の職場を奪うのではなく補完するものです。カナダのパラダイムエレクトロニクス社は、その一例です。コボットの導入により生産性が50%向上しましたが、誰も職を失ってはいません。従業員は、新しくできた分野の新しい仕事を行っています。たとえば、機械のプログラミング、自動化生産プロセスの最終工程での品質管理です。ボストンコンサルティンググループの専門家は、ロボット導入による将来の生産性向上は、従業員1人あたり最大30%になると予想しています。
産業用ロボット
産業用ロボットは、産業環境で、生産製品を搬送、組立、または加工するために使われるプログラム可能な機械です。ほとんどの産業用ロボットは、ロボットアーム、グリッパ、各種センサー、制御装置で構成されています。また、プログラムに応じて自律的に作業を実施することができます。世界のロボット密度は、過去数年間で大幅に増加しています。2015年には、従業員10,000人あたり平均で66台でしたが、現在では74台に増加しました。欧州の平均ロボット密度は99、米国では84、アジアでは63になっています。
IFR(国際ロボット連盟、各国ロボット工業会の国際的上部団体)の統計によれば、2016年の米国の産業用ロボット設置台数は、2015年から15%増加して、過去最高の約31,500台となりました。2016年の全世界の産業用ロボット使用台数は、2015年から14%増加して、約290,000台となりました。この傾向は将来も続くでしょう。今後数年の間、平均して毎年12%の増加が予測されています。
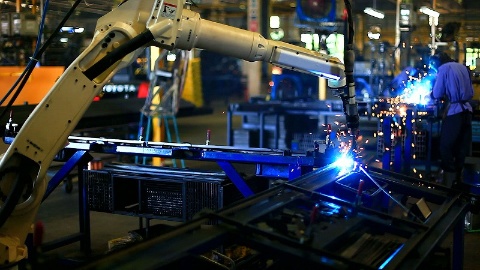
自動車業界での産業用ロボット
ロボット利用の中核となるこの業界では、50年以上にわたって、自動化生産プロセスでのワークフローの効率化、安全化、迅速化、柔軟性向上に、機械が重要な役割を果たしています。世界初の産業用ロボットであるユニメートは、1961年にゼネラルモーターズで生産プロセスに導入されました。このロボットは、射出成型部品の取り出しに使われていました。1973年には、ドイツのヴォルフスブルクにあるフォルクスワーゲンの工場で、最初の産業用ロボットが稼働を開始しました。社内で開発されたこのロボットは、人間の同僚からは「ロビー」という愛称で呼ばれ、パサートの生産プロセスで使用されました。IFR(国際ロボット連盟、各国ロボット工業会の国際的上部団体)の統計によれば、2016年の米国の産業用ロボット稼働台数は、2015年から43%増加して、17,600台を超えています。
無人搬送車(AGV)
AGVは、自動的に制御される駆動装置を備えた、運転手のいない搬送車であり、非接触の進路設定により走行します。AGVは、主に、生産施設内で材料を搬送するのに使われています。産業環境において、図体の大きい従来のベルトコンベアから、省スペースで柔軟性の高いソリューションへと進歩した結果です。その他にAGVがよく使われる場所としては、倉庫があります。個別の商品または大型の商品を扱うために、指定された梱包ステーションに運びます。この種のロボットは、秒速約1~2mで走行し、最大約2,000kgの積荷を運搬することができます。AGVには、電源、実施作業、ナビゲーションおよび経路計画プロセスの違いによる分類があります。電源は、ケーブル(レール走行AGVの場合)、レールそのもの、またはバッテリから供給されます。バッテリは、電磁誘導方式充電プレートから、または充電ステーションで充電されます。あるいは、充電ステーションでバッテリを交換することも可能です。実施する作業内容や場所によって、フォークリフト型AGVはパレットを運び、トラクタユニットはトレーラを牽引し、貨物エリアで動作するAGVは箱や梱包を搬送します。たとえば、AGVをレーザーでナビゲーションすることも可能です。その場合、ロボットは、特定の場所に設置してあるラベルを読み取って、次の目的地を見つけることができます。色の認識などによる光学的ナビゲーションを使う場合もあります。AGVの進路設定には、アンテナまたはレールも利用できます。最も柔軟性が高いのは自律型AGVであり、周囲環境全体をスキャンし、その結果から仮想マップを作成します。自律型AGVは、障害物があることを他のAGVに通知するほか、移動に最適な経路を生成することができます。AGVは、作業内容や必要とされる動作自由度に応じて、1個から4個の動輪により走行します。
サービスロボット

サービスロボットは、人に対するサービスを提供する機械です。個人利用と専門アプリケーションとに分類されます。掃除ロボットや芝刈りロボットは、個人分野ですでに定着しています。さまざまな種類のサービスロボットを以下に示します。
データ保護とデータセキュリティの問題を考慮する必要はありますが、前述のBitkomによる代表的な調査では、回答者の49%が、自宅のセキュリティをロボットに任せてもよいと考えています。セキュリティロボットは、住人がバケーション、出張、あるいは仕事で不在のときに、家の見張りをします。セキュリティロボットは、インターネット接続を通じてアプリから制御することができます。ロボットが動作検知により衝撃を感じたら、スマートフォンに警報を送ります。内蔵カメラは、高解像度の画像を記録するのに加えて、双方向の通話機能を備えています。
韓国の電子機器メーカー、LGエレクトロニクス社は、ラスベガスで開催された家電見本市CES 2018(Consumer Electronics Show)に新しいロボットシリーズCLOiを出展しました。「サービングロボット」モデルは、お客様に食事や飲物を提供します。このロボットは、24時間使用可能(たとえば、空港、鉄道の駅、ホテル)で、食事を載せたトレイをお客様に渡します。お客様への給仕が終わったら、ロボットはサービスステーションに戻って新しい食事を受け取り、次の仕事に向かいます。
農業も、ロボットが活躍する可能性が大きい分野です。現在、ロボットアームおよびマルチスペクトルカメラを装備した収穫機を使って、きゅうりの収穫作業を最適化するパイロットプロジェクトが実施されています。種まきには、タブレットから制御する小さな種まきロボットがあって、種をまくだけでなく、重要な情報をすべて記録することができます。ドローンは、野菜の成熟や雑草の状況を監視するのに適しており、さらに必要があれば、問題のある区画に農薬を散布することもできます。
治療の補助として、脳卒中や神経系疾患発症後の運動機能回復方法について患者が学習しなければならない場合に、ロボットを利用することができます。麻痺のある患者が、トレーニングマシンの助けを借りて、再び歩けるようになったり、階段を昇れるようになったりしています。1台のロボットで、療法士2人分の仕事が可能です。患者は、練習しながら直接フィードバックを受けることができます。ウェアラブルロボット(外骨格型)により、麻痺状態の患者が自分で歩けるようになります。ロボットの歩行動作は、患者の体重移動によって始まります。
手術室にもロボットがいます。外科医の代わりをするのではなく、最小侵襲手術のための精密な助手として使われています。はさみや鉗子のような手術器具を使う代わりに、外科医がコンソールでジョイスティックやペダルを使ってロボットを制御します。手術ロボットを使うと、手術の時間を短縮でき、患者への侵襲も少なくなります。ヒューマンエラーによるリスクを最小化できます。
ソニーの犬型ロボット アイボは、エンターテイメントロボットです。2006年に発売中止になりましたが、2017年に新バージョンが再発売されました。アイボは、2個のカメラとマイクで周囲の状況を認識します。取得したデータを学習プログラムで評価し、ロボット犬がそれぞれの個性を発達させるようになっています。アイボと同様に、ロバータも玩具ロボットのカテゴリに入るものです。これは、フラウンホーファーインテリジェント分析・情報システム研究所が2002年から始めた構想であり、特別なロボットを使って、子供が技術に楽しく接すること、そしてロボットの開発やプログラミングに対する関心を呼び起こすことを目指すものです。
ヒューマノイドロボット

ヒューマノイドロボットは、人間に似せて設計された機械です。ジョイントの位置や動きは、人間の運動機能をまねています。このことは、ヒューマノイドが、通常、2本の足で直立して歩行することからも明らかです。ヒューマノイドロボット分野での研究開発の主な動機は、人工知能(AI)です。
人工知能
多くの科学分野で、ヒューマノイドロボット開発は、人間に似たAIを作るための重要な基礎であると考えられています。これは、AIをプログラムで作ることはできず、AIは学習プロセスで構成されるという考えに基づいています。したがって、ロボットが社会生活に積極的に参加しなければ、人工知能を発達させることができません。しかし、コミュニケーションを含めて、社会生活に積極的に参加するためは、ロボットが、形状、動作、感覚を通じて対等な生物であると認識され、受容される必要があります。
多機能ヘルパーとしてのヒューマノイドロボット
ロボットのペッパーは、足ではなくローラーで動きますが、小さなサイズ、感じの良い声、きらきら光る丸い目で、ドイツのミュンヘン空港で乗客のお手伝いをしています。ミュンヘン空港は、ルフトハンザ航空と共同でヒューマノイドの使用実験を実施する最初の空港の一つです。ジョシーは、現在の運行状況やチェックイン情報を提供し、出発ゲートまたは最寄りのレストランまでの道順を教えてくれます。フランスの企業、ソフトバンクロボティクスが開発した機能により、WiFi経由でインターネットに接続し、クラウドにアクセスすることができ、会話を処理したり、その会話を空港データと結びつけたりします。このようにして、ジョシーは、すべての会話から学習して、それぞれの質問に回答しています。
ヒューマンマシンインタラクション
プログラミングの知識がない人でも、自然な方法でロボットとコミュニケーションして指示や情報を伝えられるようにするため、音声、ジェスチャー、顔の表情によるヒューマンマシンインタラクション(人間と機械の意思疎通)が非常に重要です。
スマートスピーカーの時代になっても、リアルタイムで自然言語を認識し解釈することは、機械にとってきわめて複雑なプロセスです。これは、周囲の音響効果、雑音、音量、方言、アクセント、あるいは全体的な音の高さなど、さまざまな要因によるものです。現在では、機械は自然言語を約95%の精度で認識できます。
待ち時間なしに人のジェスチャーを正確に認識して解釈するためには、リアルタイムでの3Dデータキャプチャが必要です。フラウンホーファー応用光学および精密工学研究所の科学者は、3Dデータを迅速に記録して処理するシステムを研究しています。2台の高速度カメラおよび1台のカラーカメラが画像を記録し、1秒間に36回、特別なソフトウェアによりその画像を3Dデータに変換します。科学者たちは、このシステムのために、ニューラルネットワークに基づく学習ソフトウェアも開発しています。
一般的には、2人での会話は、それぞれの顔の表情に基づいて進行していると言ってもさしつかえないでしょう。これは、人間とロボットとの対話についても適用できます。柔軟性のあるポリマーと内蔵サーボモータのおかげで、ハンソンロボティクス社製のロボットの顔は、さまざまな表情を示すことができます。その目的は、ロボットが、人間の顔の表情によって意思疎通できるようにすることです。たとえば、心配そうな表情であれば、人間との距離を保ち、疑問のあるような表情であれば、情報を提供します。
進行中の研究プロジェクトでは、ロボットが、人間の感情を認識して理解し、適切に反応することを学習しています。相手の感情にふさわしい表情やジェスチャーを使って、ロボットは、人間への応答となる感情を示す、あるいは、そのように装うことができます。その一例として、ベルリン・フンボルト大学の科学者が、ドイツのアーヘン大学病院およびケルン大学病院と共同で開発している、エモティスク(Emotisk)トレーニングシステムがあります。このソフトウェアは、視線や顔の表情などの情報を評価し、それにふさわしい感情を人間にフィードバックします。自閉症の人がこのシステムを使って、他人の感情を認識して、非言語信号により応答できるように設計されています。
人間と同様の外観および人間に似た態度や動作のせいで、私たちは、ヒューマノイドロボットが人格を持っているように思いがちです。実際には、人格があるようにふるまうと、ヒューマンマシンインタラクションに影響を及ぼすことができます。実験のために、豊橋技術科学大学の科学者は、対話相手である人間の目の動きによって、その人が他のことに気を取られているかどうかを検出するロボットを開発しました。検出した場合、ロボットは身を乗り出し、声を大きくして、うなずきます。この実験では、ロボットが人格特性を示すことによって、相手の人の注意を取り戻しました。
単なるスマートロボットとソーシャルスマートロボットとの境界を決めることは、まだ困難、あるいは不可能であると言えます。現時点での例としては、ジーボがあります。同名の米国企業による最初のソーシャルロボットで、2017年末から発売されています。メーカーによると、この身長約30cmの家庭用ロボットは、人々と同じ場所にいること、そしてその人たちと関係を築くことを好みます。所有者が特にどの人たちを気に入っているかを学習し、所有者の社会生活に自然にとけ込んでいきます。ジーボはかわいくて、ちょっとしたダンスのような自発的行動をして驚かせることもできます。少なくとも、メーカーはこのように言っています。実地試験では、このソーシャルロボットは、他のスマートシステムと大差ないことがわかりました。しかし、ソーシャルロボットのほうがはるかに高価です。
安全とセキュリティ
生活のさまざまな分野にロボットが使われて、さらに拡大を続けています。人と機械の協調によって、人間とデータの安全およびセキュリティについての機会とともに課題も発生しています。特に、職場での産業用ロボットおよび協働ロボットの利用について、安全が必要であることは明らかです。

ロボットを工業生産に利用する場合には、職場の安全方策によって人間を保護する必要があります。その方策としては、人と機械の間に十分な安全距離をとること、安全柵、光電バリア、監視区域のスキャナがあります。また、安全対策として、ロボットの非常停止スイッチ、物体や人との衝突を検知して適切に対処する機能があります。これは、特にコボットで必要なことです。
このような新しい産業用ロボットでは、特定の作業領域での安全柵がなくなります。それに代わる技術的安全方策が使われています。たとえば、人が数メートル離れていれば、ロボットは通常モードで動作します。人が接近して、設定距離以内に入ってくると、ロボットは減速します。人がさらに近づいてロボットとの距離がわずか1mになれば、ロボットは停止します。
さらに新しいシステムでは、ToF(Time of Flight)テクノロジーが使われています。このテクノロジーは、光の到達時間に基づいて距離を計測する3Dカメラシステムを利用します。変調をかけた光源によってロボットの周囲を照明します。カメラは、各ピクセルについて、光が対象物に到達して反射してくるまでの時間を計測し、そのデータを使って、各ピクセルから対象物までの距離を計算します。この分野では、レーダーセンサーも使われています。その場合には、無線周波数領域の電磁波を利用して物体の動きを検出します。複数のテクノロジーを組み合わせた冗長性によって、人間の安全をさらに強化することができます。
ますます多くの複雑なシステムが相互に接続されて通信している職場では、データの窃盗や改ざんからシステムを保護することが重要です。設定ファイルの改ざん(動作領域や位置情報の変更)、コード改ざん(プログラムシーケンスの変更)、ロボットフィードバックの改ざん(警報の無効化)が三大脅威です。このような侵入は、製品の破壊、ロボットの故障、さらに最悪の場合には、その付近で働いている人の傷害にもつながります。データ、インターフェイス、通信チャネルのセキュリティを保証するため、外部のソフトウェアソリューションを採用する企業が増加しています。このようなソリューションでは、設定ファイルを暗号化してセキュアエレメント(SE)に保存することにより、設定ファイルの改ざん防止を実現します。CPUへの不正アクセス防止には、認証という手段もあります。コード改ざん防止のために、送信されたコマンドに対するハッシュ処理による認証、およびコードの検証を実施するソフトウェアソリューションがあります。
歴史

ロボット、あるいはロボット工学と言えば、おそらく過去50年程度のことを考えるでしょう。多くの人は、ある程度人間に似た機械で、腕と脚があって、愛想の良い笑顔をしているものを思い浮かべます。ヒューマノイドや機械ヘルパーに対する興味は、何世紀にもわたって続いてきました。ロボット工学の発展を示す過去の出来事をいくつかご紹介しましょう。
すでに紀元前1世紀には、今日私たちが知っているロボットやロボット工学の先祖とも言えるような発明、機械、作品が存在していました。それは、ギリシャの数学者で技術者でもあった、アレクサンドリアのヘロンが作ったものです。そのため、ヘロンはメカニクスという「別名」でも呼ばれています。ヘロンは、『Automata』という著作(機械に関する本)で、さまざまな「ロボット」について記述しています。その中には、自動的に寺院の扉を開いたり、音楽を演奏したりするものもあります。世界初の古代のスマートホームと言ってもよいでしょう。カタパルトに似た武器の設計図以外にも、ヘロンの蒸気機関とも呼ばれるアイオロスの球がよく知られています。それは、最初の熱機関であり、蒸気機関の先祖となるものです。このロボット工学の元祖は、ロボットや機械の設計図を100枚以上描いています。
1495年に、多分野にわたる天才で博識家のレオナルド ダ ヴィンチは、おそらく世界初の、人間に似た機械を設計しました。メカニカルナイト(機械騎士)は、立ったり座ったりすることができました。その他には、兜のバイザー(面頬)を持ち上げたり、腕を大きく動かしたりする機能がありました。その動作は、プーリーとケーブルによる複雑なシステムで行われていました。ダ ヴィンチが実際にロボットを製作したのか、設計しただけなのかは、歴史的には判明していません。いずれにしても、その設計図に従って製作したロボット騎士は、完全に動作しました。
英語のロボットという言葉は、1920年にチェコの作家カレル・チャペックが、空想科学戯曲R.U.Rで初めて使用したものです。その戯曲は1921年1月25日に初演されました。この世界的に好評を得た戯曲では、自律的に考える機械は、人間にそっくりな形をしています。ロボットが意識を持つようになったとき、奴隷としての役割に反抗して、その結果、人類は絶滅に至ります。舞台上の「ターミネーター」という感じがあります。
エレクトロは、1939年のニューヨーク万国博覧会に登場しました。2mを超える身長で体重120kgのヒューマノイドロボットは、内蔵のレコードプレーヤーによって約700語の言葉を話すことができました。この機械人間は、腕と脚が動くほかに、電灯の色を識別し、葉巻を吸うことができました。万国博覧会の翌年、エレクトロは、ロボット犬スパーコと一緒に再登場しました。
ジョージ デボルは、1961年に世界初の産業用ロボットの特許を得ました。同年には、ゼネラルモーターズの組立ラインにユニメートが導入されました。ユニメートの構成は、コンピュータのような箱が、もう一つの箱とロボットアームに接続されたものでした。このロボットは、重いダイカスト部品を組立ラインから取り出して、自動車のボディに溶接する作業を実施しました。その当時、この生産部門は、人間の従業員にとって高い健康リスクがあるものでした。化学物質による危険に加えて、従業員が手や足を失う事故もときどき起こっていました。ドイツでは、1970年代に産業用ロボットの時代が始まりました。
2017年11月に、ミュンヘンにあるスタートアップ企業フランカ・エミカ社は、安価で柔軟性があり直観的に操作できるロボットの開発に対して、ドイツ大統領からドイツ未来賞を受賞しました。この軽量ロボットは、産業アプリケーションおよびヘルスケアで利用できます。ジョイントに内蔵されたトルクセンサーが、人間との接触に反応することでこのような協働が可能になりました。このロボットのその他の特長としては、価格があります。市場平均をはるかに下回っていて、その結果、高効率で最先端のロボットが、中小企業にとっても魅力的で手頃な価格になっています。
ロボット駆動および制御
ロボット駆動の最も重要なタイプ

基本的に、ロボット駆動には二つの型があります。電動モータと油圧駆動です。この2種類の駆動方法の特長は何でしょうか。そして、基本的にどのような相違があるでしょうか。
最新ロボットの多くは、今のところ電動モータを使っています。ヒューマノイドロボットや小型ロボットは、主にDCモータで駆動され、産業用ロボットやCNC機械の大部分は、3相モータで動作しています。アームの回転など、ロボットが同じ動作を繰り返す自動化システムでは、電動モータがよく使われます。
最新のロボットでの油圧駆動は、人工筋肉のような動作をします。2014年以来、日本の開発者たちは、ゴムホース、耐張力繊維、保護リングで構成された人工筋肉を研究しています。このシステムは、人間の筋肉を真似したもので、圧縮空気ではなく油圧により動作します。このコンセプトの特長:油圧筋肉は、高効率であるのに加えて、精密な動作も可能です。このシステムは、電動モータよりも頑丈です。油圧駆動システムを備えたロボットは、災害現場の過酷な状況にも耐えられます。
ロボット制御の三つの側面

ロボットは、認識、処理、動作という三つの側面から制御されています。今のところ、大部分のロボットは、あらかじめ決められたプログラム、または学習アルゴリズムによって制御されます。ヒューマノイドロボットやコボットは、周囲の状況やワークの認識などの重要な情報をセンサーによって認識しています。ロボットはこの情報を処理して、その結果の信号をモータに伝えて機械部分を動作させます。ロボットが環境に対して最適な動作を決める方法としては、その他に人工知能も使われています。ヒューマンマシンインタラクションの観点では、制御システムの自律性にはいくつかのレベルがあります。

グリッパ
生産プロセスを実行したり、対象物を動かしたりするためには、ロボットには機械の手が必要です。それにはさまざまな設計が考えられます。
これは、特に産業用ロボットでよく使われる種類のグリッパで、多くの場合、空圧または油圧による駆動システムを備えています。小型のロボットに相応の小型のグリッパは、空圧駆動を装備し、手頃なコストで精密な動作を実現します。油圧駆動システムは、重い負荷に使用されます。
磁気グリッパは、永久磁石グリッパと電磁グリッパに分類されます。単純な永久磁石グリッパでは、把持力は永久磁石によって得られます。把持した対象物は、永久磁石グリッパに内蔵されたピストンの力を借りて解放します。電磁グリッパには直流電流を供給して、必要な磁界を生成します。対象物は、電気エネルギーのオンオフにより把持または解放されます。
粘着グリッパは、缶や箱などの小さい対象物を把持するのに使います。粘着力とは、二つの異なる物質、または同じ物質が接触する表面の分子間力による引力です。この物質は、固体または液体の状態です。ロボットグリッパは、液体の粘着力を利用して、または特殊な粘着剤によって、対象物を移動させます。
真空グリッパは、重量物を持ち上げることができます。対象物は、周囲の空気との差圧により、グリッパの吸着パッドのシールリップに対して押しつけられます。ワークや自動車の窓などの重量物は、吸着パッドの真空によって所定位置に保持されます。このような対象物の表面は、吸着パッドで吸着できるように、平滑でなければなりません。
ヒューマノイドのハンドでは、従来のグリッパと比べて、指をより繊細に動かす必要があります。その一例は、サンパウロ大学のカングエラプロジェクトです。このロボットハンドは、人間の手と同じ大きさと形になっています。駆動信号は、金属ワイヤと変換器を通じて伝達されて、従来のロボットハンドよりも精密な動作を実現します。
センサー

ロボットは、内蔵センサーによって、物理的または化学的影響を認識して、それを信号パルスに変換します。これにより、たとえば対象物を識別したり、その位置を特定したりします。その他にもロボットは、センサーを使って、温度、動作、圧力、光、湿度などの重要な要素を認識します。内界センサーは、速度や負荷状態に関する情報を提供します。外界センサーは、特に相互作用やナビゲーションに役立ちます。重要な各種センサーの概要を以下に示します。
力/トルクセンサーは、最もよく使われているセンサーです。グリッパに装備されて、力およびトルクを記録することができます。ひずみゲージは、マイクロメートル級の変形を認識します。その変形は、変換行列によって3方向の力およびトルクに変換されます。力/トルクセンサーは、デジタルシグナルプロセッサを備えていて、変形時のセンサーデータを取得してフィルタリングし、計測値を計算した結果を通信インターフェイス経由で送信します。
誘導性センサーは、近接センサーとも呼ばれます。接触せずに、計測範囲内に存在する金属部品を認識します。これにより、たとえば、可動機械部品の終端位置を、摩耗することなく記録するのに最適です。このセンサーは高周波磁界を表面で発生させています。金属物体が測定範囲内に存在していると、発振器から出てくるエネルギーをわずかに吸収します。エネルギーの伝達がしきい値に達すると、対象物を認識したことが確認されて、センサーの出力状態が変わります。
容量性センサーは、互いに絶縁された二つの金属部品で構成され、金属および非金属の物体を認識することができます。コンデンサの静電容量の変化を利用して非接触で計測します。コンデンサの静電容量は、電極間の距離に応じて変化するので、この変化を利用して距離を計測します。容量性センサーは、たとえば、ロボット付近に人間がいるかどうかを高い精度で認識するのに使われます。
磁気センサーは、磁性体の正確な位置検出および認識に使われます。ステンレス鋼、プラスチック、木製の構造物が中間にあっても検出可能です。このセンサーは、GMR(巨大磁気抵抗効果)を利用しています。この効果は、磁性体と非磁性体の薄膜を交互に重ねた、わずか数nmの厚さの構造で発生します。この効果では、構造の電気抵抗は、磁性体各層相互の磁化方向に依存します。磁化方向が逆向きの場合は、同じ向きの場合よりもはるかに大きくなります。
触覚センサーは、対象物の機械的な接触を認識し、発生した信号を送信します。たとえば、グリッパのアーム(指)は、触覚センサーの助けを借りて、対象物の形状および位置を測定することができます。センサーは、まだ人間の感覚には及びませんが、革新的な触覚センサーであれば、人間の指先の機械的性質や触覚の受容体を模倣することができます。これにより、ロボットは、特にヒューマンマシンインタラクションにおいて、対象物の状況や重要な特性に応じて、自律的に把持力を調整できます。
ロボット工学では、光学センサーまたは視覚センサーは、画像または一連の画像から情報を取得して、その分析結果に基づいて動作あるいは反応する役目を担っています。たとえば、1台以上のカメラ(2Dまたは3D)またはスキャナでデータを記録します。光学センサーは、ロボットのナビゲーションおよび周辺環境内での方位測定で重要な役割を果たしています。
移動

ロボットがAからBへ移動するためには、さまざまな方法があります。最も一般的な方法は、車輪付きロボットです。容易に制御できて、エネルギー効率の良い移動が可能だからです。しかし、それ以外の移動方法が適していることもよくあります。たとえば、不整地の場合、あるいはロボットが限られたスペース内で移動しなければならない場合です。ロボットの自律移動は、この分野での大きな課題です。すなわち、それぞれの状況や環境に応じた最適な移動方法をロボット自身が決定するということです。
最も一般的な移動方法は、4個の車輪を使うことです。しかし、移動性を高めたり、部品点数を減らしたりするために、1個または2個の車輪を持ったロボットもあります。不整地走行ロボットには、6個以上の車輪が付いています。
この種類の移動方式の一例として、畜産業で使われる給餌ロボットがあります。餌用コンテナ、混合装置、計量装置がレールからつり下げられるか、またはレールにガイドされて横方向に移動します。電源はバッテリ、ケーブルまたは給電用レールから供給されます。ロボットは、コンテナに取り付けられたプロセスコンピュータによって制御されます。給餌ロボットには、固定位置にある倉庫または混合コンテナから新しい餌が供給されます。
2本の脚で直立歩行するロボットは、特に安定性の点で、今でも開発者にとって大きな課題となっています。ZMP(ゼロモーメントポイント)アルゴリズムは、ホンダのアシモが2足歩行するために使ったソリューションです。しかし、このモデルでは、平面を移動する必要があります。したがって、このロボットは不整地の移動には適していません。より進歩した方法としては、動的補償アルゴリズムがあります。これは、ZMPテクノロジーよりもロバストであり、ロボットの動作を常に監視して、安定になるように足を接地させます。このテクノロジーを利用したロボットは、ジャンプすることもできます。もう一つの方法は、受動ダイナミクスであり、振り出した脚の運動量を効率的に利用します。このテクノロジーでは、ロボットは坂を登ることも可能ですし、ZMPテクノロジーのロボットよりも10倍効率的に移動できると言われています。現在、移動とバランスに関して最も印象的な例は、ボストンダイナミクス社のロボットです。歩行ロボット、アトラスの最新バージョンは、信じられないようなジャンプや後方宙返りをすることができます。
飛行ロボットと言って最初に思い浮かぶのは、ドローンです。今では民生用および軍用分野で幅広く使われています。しかし、その他にも興味深いコンセプトとして、たとえば、EUプロジェクトARCAS(Aerial Robotics Cooperative Assembly System、飛行ロボット協働組立システム)があります。ドイツ航空宇宙センターの科学者は、自律ヘリコプターとロボットグリッパアームを一体化しています。このロボットは、パイプラインの検査や修理に使われています。その他の利用分野としては、人工衛星や産業プラントのメンテナンス、他の惑星でのインフラ建設が考えられます。2013年には、ハーバード大学の研究者が、飛行して水に飛び込むことができるロボット蜂を開発しました。将来は、この小型ロボットが、絶滅の危機にさらされている蜂に代わって植物に授粉するようになるでしょう。
移動ロボットは、周囲の状況を認識し、最適な経路を決定し、人間や移動物体などの動的な出来事に反応するため、ナビゲーション用ハードウェアおよびソフトウェアの両方を備えています。多くの場合、GPS航法装置、レーダーセンサーの他に、ライダー(Lidar)テクノロジーまたはカメラを組み合わせることによって、ロボットは、環境の中を安全に走行したり行動したりします。
概要および展望
ISS(国際宇宙ステーション)のスマートデジタルアシスタントは、将来の火星探査ミッションで、人間のストレス軽減に使われるでしょう。VRスーツを含めて、アバターロボットがあれば、実際にそこにいなくても、誰でも世界中のあらゆる場所を訪問することができます。高さ4m、重さ3tのロボットは、競走の概念を変えてしまうでしょう。間違いなく言えることは、過去数年の急速な発展を考えると、ロボット工学は、今後も持続的な影響力を持ち、人類の未来を築くとともに、ますますインテリジェントで自律的になる機械との協働および共存を具体化していくでしょう。これに伴って生じる問題は、技術よりも倫理に関係してきます。
人間は、技術的に可能なことは何でも実施するべきでしょうか。機械は、どれだけインテリジェントになるべきでしょうか。ロボットが、ますますインテリジェントになって、将来のある時点で、人間はロボット発展の障害だと考えるようになってもよいのでしょうか。自動運転車は、衝突が避けられないとき、どのように反応するべきでしょうか。子供の集団がいる方向よりも、高齢者の集団がいる方向へハンドルを切るほうがよいのでしょうか。私たちは、自分の人格を機械のハードディスクに転送して、肉体が消滅した後でも自分が存在し続けるようにしてもよいのでしょうか。今のところ、このような問題は、まだまだ遠い将来のことです。現在の話に戻って、生活のさまざまな分野でロボットがどのように使われているかを示すプロジェクトの概要を紹介しましょう。
アプリケーション例:サービス
座席がなく、テーブルがなく、バーカウンターもありません。2018年にサンフランシスコに開店したカフェ Xは、すべてが効率と超高速サービスのために設計されています。2台のコーヒーマシンと1台のロボットアームが、未来のカフェイン補給を提供します。顧客は、温かい飲物と追加注文をタッチスクリーンで選んで、携帯電話の番号を入力して、クレジットカードで支払います。約30秒後に、コード番号がスマートフォンに送られてきます。商品提供ステーションでそのコード番号を入力すると、コーヒーを注いでくれます。プロセス全体の時間は、1分もかかりません。ロボットの監視とコーヒー豆やミルクの補給などを担当するカフェの従業員は、1人で十分です。
Zume Pizzaは、サンフランシスコのベイエリアにあります。この会社の最大の注目点は、人と比べて5倍の速さで生地(ドウ)を成形することができる、ドウボットです。いかにもそれらしい名前です。ロボットは、完璧な分量のソースを注出したり、ソースを広げたり、オーブンからピザを取り出したりします。毎朝、その日に必要なピザの数量と種類を計算します。すなわち、注文ごとにピザを一から作るのではありませんが、従来のファストフードと比べれば、出来たてに近いものになっています。注文は、スマートフォンまたは同社のウェブサイトから行います。この会社は、ピザを受け取るための店舗を持っていません。ピザはすべて宅配されます。
アプリケーション例:高齢者介護および看護
看護師や介護士が患者を持ち上げたり移動させたりするときの身体的負荷が高いため、たびたび健康問題の原因になっています。エレボンプロジェクトでは、フラウンホーファー生産技術およびオートメーション研究所が、ヘルスケア業界で働く人の負担を軽減しようとしています。エレボンは、人を持ち上げて移動させる半自動リフターです。この多機能型の患者リフターは、静止状態で介護できるように設計されていて、さらに目的地までの患者移動を自律的に行います。エレボンは、さまざまな移動プロセスを実行でき、横になった状態または座った状態で患者を移動させることができます。スタッフは、リフターをスイッチ操作で呼び出すことができるので、時間の節約および不要な歩行動作の削減を実現します。
アプリケーション例:輸送
有人飛行が認められた世界初のマルチコプターは、ドイツ製です。垂直離着陸機ボロコプター 2Xは、18個のローターを持ち、2人乗りで完全自律飛行可能です。搭乗者がジョイスティックを使ってマルチコプターを操縦することもできます。空飛ぶタクシーや展示会場のシャトル便として利用できます。電動モータで駆動されるボロコプターは、独自の活動拠点を使って、空港やビジネスパークのような重要地点と都心部を結びます。
物流サービス企業のヘルメス社は、ドイツの都市でスターシップというロボットで荷物を配達する実験を行っています。同社は、2018年に5~10都市で物流ロボット利用を計画しています。スターシップは、エストニアおよび英国ロンドンに拠点を持つ同名の企業が開発、製作、保守を行っています。このロボットは、ヘルメスの支店から半径4km以内の顧客に荷物を配達します。この機械は衛星測位システムを通じて制御されます。システムが市街地図を学習した後は、完全に自律的にナビゲーションすることができます。
メルセデスのフューチャーバスは、2016年にオランダのアムステルダムで初めて姿を見せました。試行モードでは、このバスは、スキポール空港からハールレム市まで、20kmの区間を問題なく走行しました。このバスは、バス専用レーン(BRT=バスラピッドトランジット)を自律的に走行し(最初は監視のために運転手が乗車)、障害物を認識すると自動的にブレーキをかけます。システムは、交通信号と通信しています。また、バス停で正確に停止します。この市内バスは、天候、乗客数、道路状況などの情報を相互に交換することができます。フューチャーバスは、2020年初頭に量産を開始する予定です。
アプリケーション例:職場
2017年1月に、オランダのロボットセキュリティシステムズ社は、SAM3セキュリティロボットの販売を開始しました。このロボットは、ビルのセキュリティ用に設計されていて、移動中に人や障害物を認識でき、障害物を避けたり、エレベーターやドアを操作することもできます。一定時間内に内蔵のIDリーダーで人を識別できなかったり、ロボットに対して妨害行為を行ったりすると、SAMは警報を鳴らします。このロボットは、プログラムされた領域をスキャンしながらパトロールし、火災やビル内の各種機器の故障を発見することができます。この機械は、1台の熱探知カメラと4台のカメラを装備して、360度の視界を確保しています。最高速度は、時速10kmです。
2017年にデンマークのニルフィスク社は、自律的に床を洗浄する掃除機を発売しました。アドバンスリバティ A50は、センサー、カメラ、ソフトウェアを備えた床洗浄ロボットで、人間が1回操縦すると室内情報を記録することができます。このロボットは、テニスボール程度の小さい障害物を認識し、自動的に回避します。営業中のスーパーマーケットでも使用することができます。
アプリケーション例:家庭
メーカーのエイスース社によれば、家庭用ロボットのゼンボは、ヘルパー、エンターテイナー、仲間として、家庭で役に立ちます。スマートホームシステムと統合すれば、ゼンボは、玄関のベルを鳴らした人が誰なのかを確認することができます。玄関ドアのカメラからの画像がロボットに送られると、家の所有者は、それを見て遠隔操作でドアを解錠できます。高齢者がいる住宅での利用に備えて、緊急通報機能があります。ロボットは、誰かが倒れたことを検知すると家族に通報します。ゼンボは、家の中にいる人に、薬を飲むように知らせたり、診察の予約があることを知らせたりすることもできます。
アプリケーション例:医療
米国のアリゾナ州立大学の研究者は、体内の腫瘍を自動的に探索して、腫瘍への血流を遮断することができるナノロボットを開発しました。マウスによる実験では、腫瘍やガンの転移は、このテクノロジーによって治療できました。ナノボットが血流の中で腫瘍の血管を発見すると、その部分の血液を凝固させます。その結果、腫瘍が縮小して死滅します。この科学者たちの報告によれば、ナノボットは急速に作用し、体内に注入してからわずか数時間後にガン細胞を包囲するとのことです。今のところ副作用はありません。
更新:2018年3月


